![]()
Top > Secure Device Research Center
Secure Device Research Center
Secure Device Research Center
 |
Prof. Yasuharu KOIKE |
|
Room:J3-1119 |
- Section Secure Device Research Center
- Objective Investigate of brain function such as motor control and applications to human interface
- Current Topics
・Computational Neuroscience
・Modeling of a musculo-skeletal system
・Brain Machine Interface
・Human Interface by biological signals
・Motor learning by reinforcement learning
*Outline of Research Activities(PDF)
 |
| Human interface using EMG signals: EMG signala, which indicate muscle activities, are measured. These signals can bring the robot in the virtual environment or slave of ourselves into action. |
 |
Assoc. Prof. Joon-wan KIM |
|
Room:J3-1115 |
- Section Secure Device Research Center
- Objectives Advanced Micro-mechatronics by MEMS technology and its applications
- Current Topics
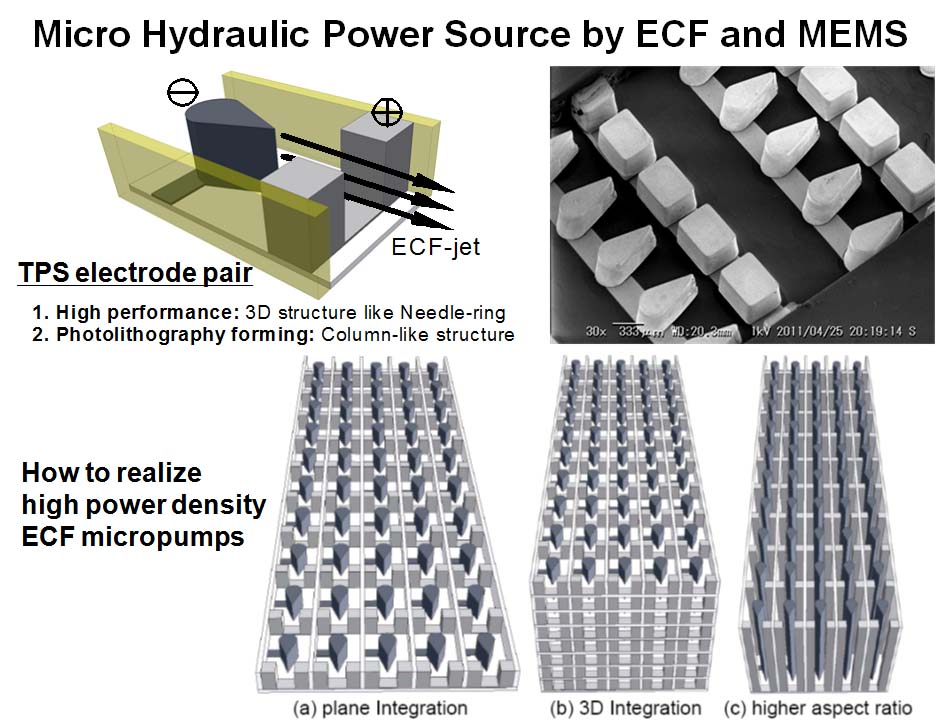
・Micro hydraulic power source (micropump) driven by ECF jet
・Liquid cooling system by ECF micropump
・ECF flexible actuators (micro hands or micro manipulators)
・Focus-tunable ECF microlens by MEMS technology.
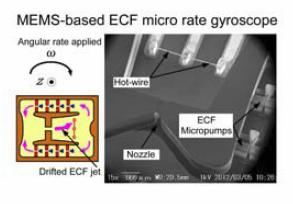
・MEMS-based ECF micro rate gyroscopes.
*Outline of Research Activities
 |
 |
| ECF Micropump by triangular prism and slit electrodes | |
 |
Prof. Mitsuo KAWATO |
|
Room:R2-516 |
- Section Bio-device Section
- Objectives Computational Study of the Brain
- Current Topics
・Computational Neuroscience
・Internal Models in the Cerebellum
・Robot Learning by watching
*Outline of Research Activities(PDF)
 |
 |
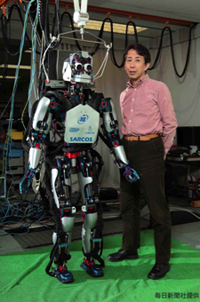
| Computational Brain -interface | Exoskeleton Robots for Rehabilitation |
 |
Prof. Takayuki SHIBATA |
|
Room: |
- Section Secure Device Research Center
- Objectives
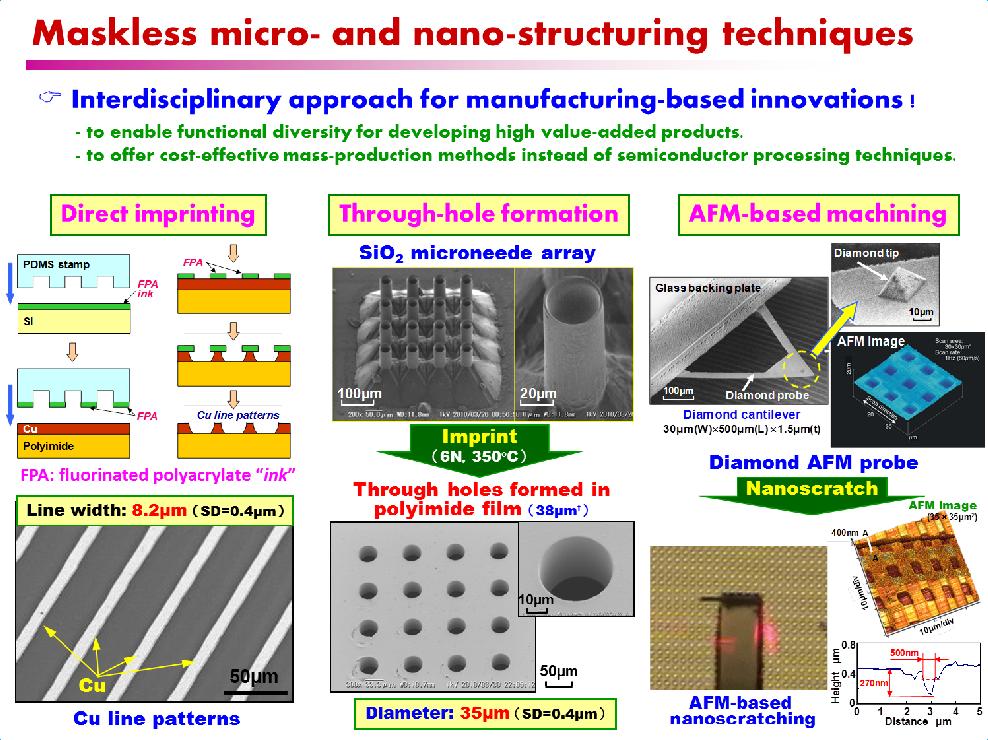
・Maskless micro- and nano-structuring techniques
・MEMS-based platform for in vitro manipulation and analysis of living cells - Current Topics
・A smart nanomachining and nanomeasurement system
・Micro- and nanoimprint techniques
・A chip-based system for cell manipulation and cellular function analysis
・Multi-functional biological scanning probe microscope
*Outline of Research Activities
 |
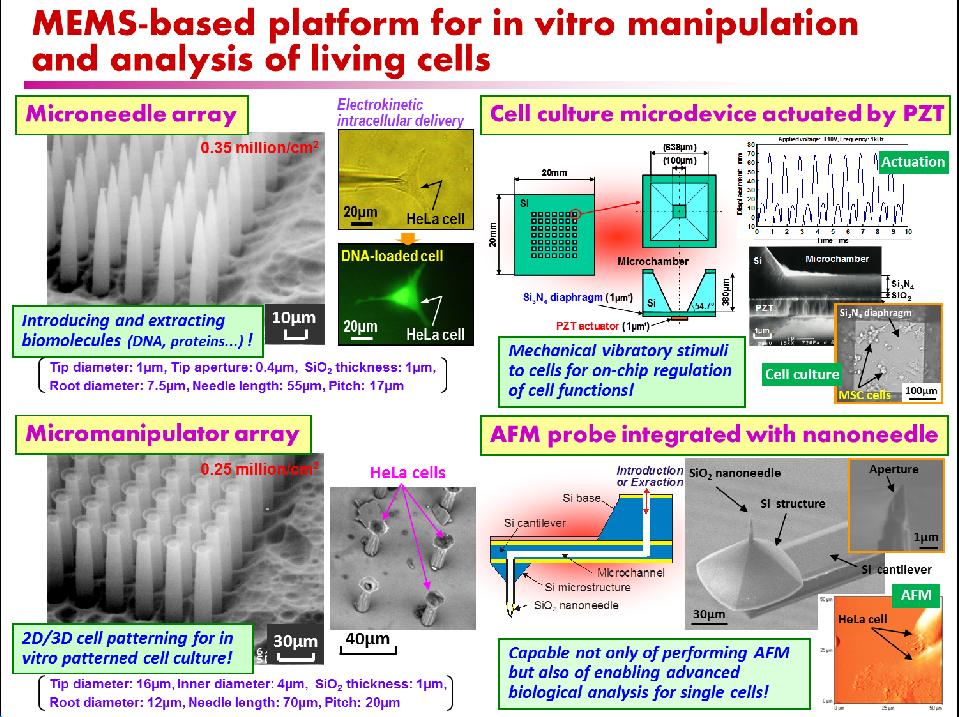 |
| Maskless micro- and nano-structuring techniques | MEMS-based platform for in vitro manipulation and analysis of living cells |
 |
Assoc. Prof. Eiichirou TANAKA |
|
Room: R2-313 |
- Section Secure Device Research Center
- Objectives
・Development of life support apparatuses for the elderly and apoplexy patients
・Automatic abnormal diagnosis instead of skilled workers - Current Topics
・Development of a walking assistance apparatus enabled for neuro-rehabilitation of patients and for the promotion of exercise for the elderly
・Development of assistance apparatuses for upper limbs, standing-up motion, and lifting-up motion
・Development of a method of the automatic diagnosis for geared machines using laser beam reflection
*Outline of Research Activities(PDF)
 |
 |
Prof. Xiaolin ZHANG |
|
Room:R2-810 |
- Section Information Processing and Recognition
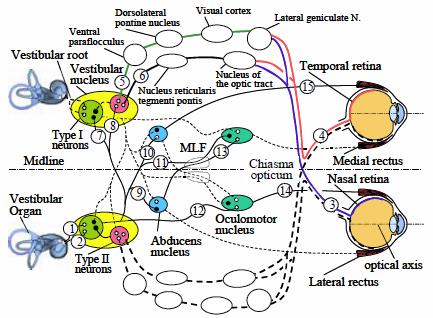
- Objectives Investigate of life vision and applications to Robot vision; and analyze the signal processing function of neutron physically and structure the equivalent citcuits.
- Current Topics
・Binocular active vision
・Electrical equivalent circuit of neutron
・Development of fixational eye movements detection system
・Binocular active security camera system
*Outline of Recent Activities(PDF)
 |
 |
| Neural pathways of horizontal binocular motor system | The setup of a vergence experiment |
 |
Prof. Kenji KAWASHIMA |
|
Room:R2-420 |
- Section Dynamic Systems
- Objective Control and measurement of fluid power systems
- Current Topics
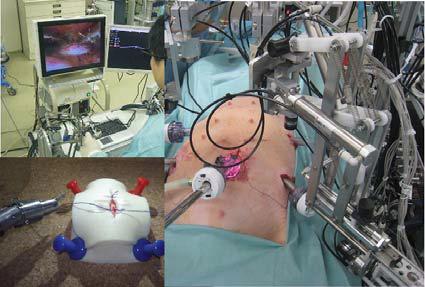
・Forceps manipulator for telesurgery with force display
・Accurate position control of a pneumatic servo table
・Power assist robot arm using pneumatic artificial rubber muscle
・Active control of air spring systems for railway vehicle and semiconductor manufacturing equipments
・Monitoring of flow field with measurement integrated simulation
*Outline of Research Activities(PDF)
 |
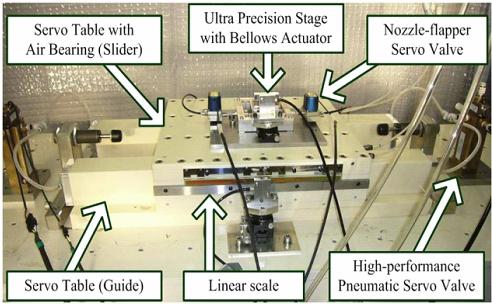 |
| Experimental scenery with the developed multi DOFs forceps | Pneumatic servo table with air bearing |
![]()
- Ookayama Campus
- 2-12-1 Ookayama, Meguro-ku, Tokyo 152-8550

- Suzukakedai Campus
- 4259 Nagatsuta-cho, Midori-ku, Yokohama, Kanagawa 226-8503
- Tamachi Campus
- 3-3-6 Shibaura, Minato-ku, Tokyo 108-0023
![]()
Copyright (C) Tokyo Institute of Technology. All rights reserved.